_画板-1@2x.png)

Giriş:
Modern endüstriyel ölçüm ve otomasyon kontrolünde direnç köprüsü sensörleri, yüksek doğruluk ve kararlılıkları nedeniyle ağırlık, basınç ve gerinim gibi fiziksel büyüklüklerin algılanmasında yaygın olarak kullanılmaktadır. Bununla birlikte, yüksek performanslı bir direnç köprüsü ölçüm sisteminin nasıl tasarlanacağı ve pratik uygulamalarda güvenilirliğinin ve doğruluğunun nasıl sağlanacağı birçok mühendis ve teknisyenin karşılaştığı bir zorluktur.
Bu makalede SSP1X20 direnç köprüsü ölçüm uygulaması örnek olarak ele alınmakta ve donanım devresi tasarımından cihaz seçimine, parametre hesaplamasından yazılım uygulamasına kadar eksiksiz teknik çözüm ayrıntılı olarak tanıtılmaktadır. Wheatstone köprülerinin temelleri, gerinim ölçer yük hücrelerinin nasıl çalıştığı ve orantılı ölçüm tekniklerinin uygulanması yoluyla, sistem performansının nasıl optimize edileceğini ve yaygın sorunlara nasıl çözüm sağlanacağını araştırıyoruz.
İster elektronik mühendisi, ister gömülü geliştirici veya yüksek hassasiyetli ölçüm teknolojisiyle ilgilenen bir meraklı olun, bu makale size pratik teknik referanslar ve uygulama fikirleri sağlayacaktır. Daha sonra, ilkelere genel bir bakışla başlayacağız ve bu sistemin tasarımını ve uygulamasını adım adım analiz edeceğiz.
1. Prensiplere Genel Bakış:
1.1 Wheatstone köprüsünün temel çalışma prensibi
Wheatstone köprüsü dengeli bir devrede dört dirençten oluşur ve temel yapısı aşağıdaki gibidir:
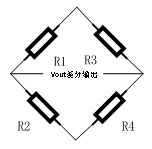
Denge durumu: R1/R2 = R3/R4 olduğunda, köprü dengelidir, Vout = 0
Çıkış Gerilimi:
Çalışma prensibi:
Gerilim dağılımı: Köprünün Vs besleme gerilimi köprünün her iki ucuna uygulanır ve akım R1, R2, R3 ve Rx (test direnci) dirençleri üzerinden dağıtılır. Köprünün denge durumu, iki dalın gerilimlerinin eşit olduğu ve çıkış geriliminin sıfır olduğu anlamına gelir.
Ölçüm Prensibi: Wheatstone köprüsünün ana fikri, gerilimdeki değişiklikleri ölçerek dirençteki değişiklikleri yansıtmaktır. Direnç değiştiğinde, köprü artık dengeli değildir ve galvanometre akımı gösterir, böylece dirençteki değişiklik akımdaki değişiklikle çıkarılabilir.
1.2 Gerinim ölçer yük hücresi prensibi
Direnç gerinim ölçerlerin çalışma prensibi gerinim etkisine dayanır, yani iletken veya yarı iletken malzeme dış kuvvetin etkisi altında mekanik deformasyon ürettiğinde, direnç değeri buna göre değişir ve buna "gerinim etkisi" denir. Yarı iletken gerinim ölçerler yarı iletken malzemelerden yapılır ve çalışma prensipleri yarı iletken malzemelerin piezorezistif etkisine dayanır. Piezorezistif etki, yarı iletken bir malzemenin belirli bir eksende harici bir kuvvete maruz kaldığında direncinin değişmesi olgusunu ifade eder. Gerinim ölçer, kullanıldığında bileşenin ölçüm noktasına sıkıca yapıştırılan gerinimi ölçmek için hassas ızgaralardan oluşan bir bileşendir ve bileşen gerildikten sonra ölçüm noktasının gerinimi ve hassas ızgara da deforme olur ve direnci değişir ve daha sonra direnç değişimi özel bir aletle ölçülür ve ölçüm noktasının gerinim değerine dönüştürülür. Kablolu direnç gerinim ölçerler ve folyo direnç gerinim ölçerler dahil olmak üzere metal direnç gerinim ölçerlerin birçok çeşidi ve formu vardır. Folyo dirençli gerinim ölçer, test parçasının gerinim değişkenini dirençteki bir değişikliğe dönüştürebilen hassas bir geçit olarak metal folyo kullanılarak gerinim direnci etkisine dayalı olarak yapılan hassas bir elemandır.
1.3 Oransal ölçüm prensibi
Temel avantajlar: Sensör güç kaynağı ve ADC referansı olarak aynı uyarma kaynağını kullanın.
Transfer fonksiyonu: Dijital çıkış kodu ∝ (Vsensör / Veksitasyon) × kazanç
Hata ofset mekanizması: uyarma voltajı kayması hem sensör çıkışını hem de referans voltajını etkiler; oran hesaplamalarında birbirini iptal eder; Sıcaklık kayması ve güç kaynağı gürültüsü gibi ortak mod hataları ortadan kaldırılır.
2. Donanım devre tasarımı
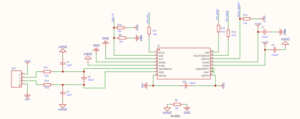
- Devre bağlantı talimatları
- Dijital giriş ve çıkış pinleri (CS, SCLK, DIN, DOUT/DRDY, DRDY'nin kullanılmasına gerek yoktur), yumuşak geçişe, aşımın bastırılmasına ve bir tür aşırı gerilim korumasına olanak tanıyan 47Ω'luk bir dirençle seri olarak bağlanır.
- Harici bir referans kullanıldığında, kanal 0 seçilir ve referans voltajı 5V'tur.
- AIN0/REFP1 ve AIN1, analog girişten gelen kaçak akımı en aza indirmek için askıya alınır.
- Güç kaynağından aşırı kaçak akımı önlemek için CLK'yı GND'ye bağlayın.
- SIPROIN, diferansiyel kapasitörün (C2) ortak mod kapasitöründen (C1, C3) en az bir büyüklük sırası (10x) daha yüksek olmasını önerir, çünkü ortak mod kapasitansının uyumsuzluğu, ortak mod gürültüsünün diferansiyel gürültüye dönüştürülmesine neden olabilir, aşağıdaki gibi yapılandırılmıştır: R17 = R18 = 1kΩ, C2 = 100nF, C1 = C3 = 10nF.
- C8 ve C7 kapasitörleri, güç dekuplajı sağlamak üzere eşdeğer seri direnç (ESR) ve endüktans (ESL) özellikleri sağlamak için çok katmanlı seramik çip kapasitörleri (MLCC'ler) kullanır.
3. Cihaz seçimi ve parametre hesaplama
3.1 Çekirdek Cihaz Seçim Tablosu
| Cihazlar | Teknik Özellikler | miktar | Seçim esası |
| ADC çipi | SSP1220, TSSOP-16 | 1 | Entegre PGA ile 24 bit Δ-SIGMA ADC |
| Giriş filtre direnci | R17=R18=1KΩ,0805 | 2 | Akım sınırlama koruması, filtreleme |
| Diferansiyel kapasitörü girin | C2=100nF, X7R, 50V, 0805 | 1 | Diferansiyel gürültü filtreleme |
| Giriş ortak mod kondansatörleri | C1=C3=10nF, X7R,50V,0805 | 2 | Ortak mod gürültü bastırma |
| dekuplaj kondansatörleri | C7=C8=100nF, X7R,16V,0603 | 2 | Düşük ESR/ESL MLCC |
| Harici referans kaynağı | 5V±0,1% | 1 | Yüksek hassasiyetli kıyaslamalar |
3.2 Parametre hesaplama
3.2.1 Dijital Arayüz Direnci Hesaplaması
(1) 47Ω direncin analizi:
Ana işlevler: sinyal aşımını ve zil sesini bastırır; Sınırlı aşırı gerilim koruması sağlar; Sinyal kenarlarını yavaşlatır ve EMI'yi azaltır.
Sinyal bütünlüğü analizi: Veri yolu kapasitansını varsayarsak: Cbus = 20pF; Zaman sabiti: τ = R × C = 47Ω × 20pF = 0,94ns, SPI saat frekansı üzerindeki etkisi: Yaklaşık 50MHz'e kadar destekleyebilir.
(2) Güç tüketimi hesaplaması
Dijital Pin Akımı (Tipik):
Giriş kaçak akımı: ±10μA
47Ω'da güç tüketimi: P = I² × R = (10μA)² × 47Ω ≈ 4,7nW
İhmal edilebilir
3.2.2 Filtre parametrelerinin hesaplanması
(1) Diferansiyel filtre hesaplaması
Diferansiyel kesme frekansı:
![]()
![]()
![]()
Diferansiyel empedans:
![]()
(2) Ortak mod filtre hesaplamaları
Ortak mod kesme frekansı:
![]()
![]()
![]()
Ortak Mod Empedansı:
![]()
3.2.3 Kapasitans oranı doğrulaması
C2 : C1 = 100nF : 10nF = 10:1, bu da oranın 10 katı gereksinimlerini kesinlikle karşılar.
Ortak moddan diferansiyel bastırmaya: Ortak mod kapasitör uyumsuzluğu varsayımı: ±5%
Diferansiyel gürültü üretilir: V_cm_to_diff ≈ V_cm × (ΔC/C) ≈ V_cm × 5%, bu etki katı bir ölçekte en aza indirilir.
3.3.3 Sistem Performansı Hesaplaması (Harici 5V Referans Kullanarak)
(1) Sinyal aralığı hesaplaması
Sensör Özellikleri: Tam Ölçekli Çıkış: Vout_max = 5V × 3mV/V = ±15mV
PGA Kazanç Seçimi: 128
Referans Voltajı: 5V (Harici)
Tam ölçekli giriş aralığı:
FSR = ±Vref / Kazanç = ±5V / 128 ≈ ±39,06mV
Doğrulama: 15mV < 39,06mV, yeterli marj ile.
(2) Çözünürlük hesaplamaları
LSB Boyutu:
1 LSB = FSR / 2²³ = 39,06mV / 8.388.608 ≈ 4,66nV
Teorik çözünürlük:
Gerilim çözünürlüğü = 4,66nV
Gravimetrik çözünürlük = (1kg / 15mV) × 4,66nV ≈ 0,31μg
(3) Gerçek doğruluk hesaplaması
Gürültü Performansı (@Gain 128, 20SPS):
Giriş Referans Gürültüsü: 0,09μVrms (tipik)
Tepe gürültüsü: yaklaşık 0,41 μVpp
Ağırlık ölçüm gürültüsü:
Ağırlık gürültüsü = (1kg / 15mV) × 0,09μV ≈ 6mg_RMS
Gürültüsüz çözünürlük ≈ 27mg_PP
4. Yazılım uygulaması
4.1 Yapılandırmayı başlatın:
void configure_bridge_measurement(void) {
uint8_t config_regs[4] = {0};
// MUX'u AIN1-AIN2 olarak ayarlayın, Kazanç=128, PGA etkin
config_regs[0] = SSP1x20_MUX_AIN3_AIN2 | SSP1x20_GAIN_128 | SSP1x20_PGA_BYPASS_OFF;
// Veri hızı gibi diğer parametreleri ayarlayın
config_regs[1] = SSP1x20_DR_20SPS | SSP1x20_MODE_NORMAL | SSP1x20_CC | SSP1x20_TS_OFF | SSP1x20_BCS_OFF;
// Referans voltajı ve diğer ayarlar
config_regs[2] = SSP1x20_VREF_REF0 | SSP1x20_REJECT_BOTH | SSP1x20_PSW_ON | SSP1x20_IDAC_OFF;
// DRDY modu
config_regs[3] = SSP1x20_IDAC1_OFF | SSP1x20_IDAC2_OFF | SSP1x20_DRDYM_DRDY;
// Kayda yaz
SSP1x20_WriteRegister(SSP1x20_REG0, 4, config_regs);
}
4.2 Ham verileri okuma
int32_t read_bridge_sensor_raw(void) {
uint32_t raw = SSP1x20_read_data_rdata();
if (raw & 0x800000) {
return (int32_t)(raw | 0xFF000000);
}
return (int32_t)raw;
}
4.3 SHelling ve kalibrasyon
// bombardıman
void tare_bridge_sensor(void) {
SSP1X22_offset = read_bridge_sensor_raw();
}
Ölçek faktörünü kalibre edin
void calibrate_bridge_sensor(double known_weight) {
tare_bridge_sensor(); // Önce temizleyin
int32_t raw_data = read_bridge_sensor_raw();
// Ölçek faktörünün hesaplanması (1000 g'a karşılık gelen ADC değeri)
SSP1X22_scale = known_weight / (raw_data - SSP1X22_offset);
}
Açıklanan temel parametreler:
SSP1x20_PGA_BYPASS_OFF
- PGA_BYPASS
Sadece 10~20 mV'luk bir köprü sensör çıkışıyla, 24 bit ADC'nin doğruluk avantajlarından amplifikasyon olmadan yararlanılamaz.
Buff'ları kullanmak için (örn. 64, 128), bypass → PGA_BYPASS_OFF kapatılmalıdır
SSP1x20_MUX_AIN3_AIN2
- MUX diferansiyel kanal seçimi
Wheatstone köprüsü çıkışı bir diferansiyel sinyaldir ve sensörün pozitif çıkışının AIN3'e ve negatif çıkışının AIN2'ye bağlandığından ve yazılımın ilgili diferansiyel çifti seçtiğinden emin olmak için diferansiyel giriş modu kullanılmalıdır.
SSP1x20_VREF_REF0 // yani REFP0-REFN0
- VREF referans kaynağı
- Çekirdeğin farkına varın Rasyometrik Ölçümün!
- REFP0'ı sensörün uyarma voltajının pozitif ucuna bağlayın (örn. AVDD veya EXC+).
- REFN0 uyarımın negatif ucuna (GND) bağlanır.
→ Güç kaynağı dalgalansa bile, ADC tam ölçeği sensör çıkışıyla aynı oranda değişir ve okumalar değişmeden kalır.
- Yanlış sonuçlar:
Dahili referanslar veya sabit VREF'ler kullanılırsa, güç dalgalanması doğrudan ağırlık hatalarına dönüşür.
SSP1x20_DR_20SPS
- Veri hızı DR
ΔΣ ADC'ler doğruluk ve hız ile değiştirilebilir:
- 20SPS → yüksek çözünürlük (> 21 bit etkili), güçlü güç frekansı reddi
- 1000SPS → yüksek gürültü ve etkili bit sayısı düştü
4.4 Anahtar algoritma modüllerinin açıklaması
4.4.1 SHelling
void tare_bridge_sensor(void){
SSP1X22_offset = read_bridge_sensor_raw();
}
- Fonksiyon: Sıfır ofsetini ortadan kaldırın (sensör başlangıç dengesizliği, devre yanlış hizalaması vb. dahil).
- Çağrı zamanlaması: Sistem açıldıktan sonra ve yüksüz olarak bir kez çalıştır
4.4.2 Ham Veri Okuma
int32_t read_bridge_sensor_raw(void){
Uint32_t raw = SSP1X20_read_data_rdata();
If (raw & 0x800000){
Dönüş (int32_t)(raw | 0xFF000000); Sembol genişletme
}
return (int32_t)raw;
}
- 24 bit işaretsiz veriyi işaretli bir 32 bit tamsayı
- Negatif değerleri işleme (en yüksek bit 1 olduğunda sembol genişletme gereklidir)
4.4.3 Ağırlık hesaplaması
double get_weight_from_bridge(double scale_factor){
int32_t raw_data = read_bridge_sensor_raw();
(raw_data - SSP1X22_offset) * scale_fator döndürür;
}
- Temel formül: ΔHam × Ölçek = Ağırlık
- önce tare() çalıştırılmalıdıraksi takdirde ofset çalışmayacaktır
4.4.4 Kalibrasyon
viod calibrate_brifge_sensor(double known_weight){
take_bridge_sensor(); 1. Bombardıman
HAL_Delay(10);
int32_t raw_max = read_bridge_sensor_raw(); 2. Tam ölçek değerini okuyun
if (raw_max ==(int32_t)SSP1X22_offset){
Sıfırlama hatalarını önler
dönüş ;
}
SSP1X22_scale = known_weight / (raw_max - (int32_t)SSP1X22_offset);
}
- Ön Koşul: Köprü manuel olarak ilgili bilinen_ağırlık durumuna ayarlanmıştır (örn. 100g).
- Çıktı:Optimum Ölçek değerini otomatik olarak hesapla
Bu sistem, yüksek hassasiyetli köprü ölçümünü şu yollarla gerçekleştirir bombardıman + doğrusal kalibrasyon. Çekirdek:
Doğru donanım köprü yapısı + makul yazılım kalibrasyon süreci = güvenilir ağırlık çıktısı
Sadece şundan emin olun:
- Köprü etkili bir diferansiyel voltaj üretebilir,
- Bombardıman ve kalibrasyon adımlarını doğru sırada uygulayın,
- Ölçek faktörü gerçek fiziksel miktarla eşleşir,
Simüle edilmiş veya gerçek sensör senaryolarında kararlı bir şekilde çalışabilir.
5. Yaygın sorunlar ve çözümleri
| Fenomen | Olası nedenler | Çözüm |
| Okuma değeri her zaman sıfırdır | Kabuksuz / Sensöre güç verilmemiş | Uyarma gerilimini kontrol edin, dara() gerçekleştirin. |
| Veriler şiddetli bir şekilde sıçrıyor | Güç kaynağı gürültüsü / zayıf topraklama | Geliştirilmiş güç filtreleme, tek noktadan topraklama |
| Negatif değerler görüntülenir | AIN+ ve AIN- birbirinin tersidir | OUT+ ve OUT- Sensörlerini Değiştirin |
| Okuma doygunluğu (maksimum) | Giriş aşırı ölçek / Kazanç çok yüksek | Kazancı azaltın veya sensör direncini kontrol edin |
| Şiddetli sıcaklık kayması | Sıcaklık dengelemesi yok / dengesiz güç kaynağı | Harici VREF'lerden kaçınmak için oran ölçümlerini kullanın |
Tam kod, teknik desteğimizle iletişime geçerek elde edilebilir. İletişim +8618014203727

